Napsal uživatel Jiří Šretr dne .
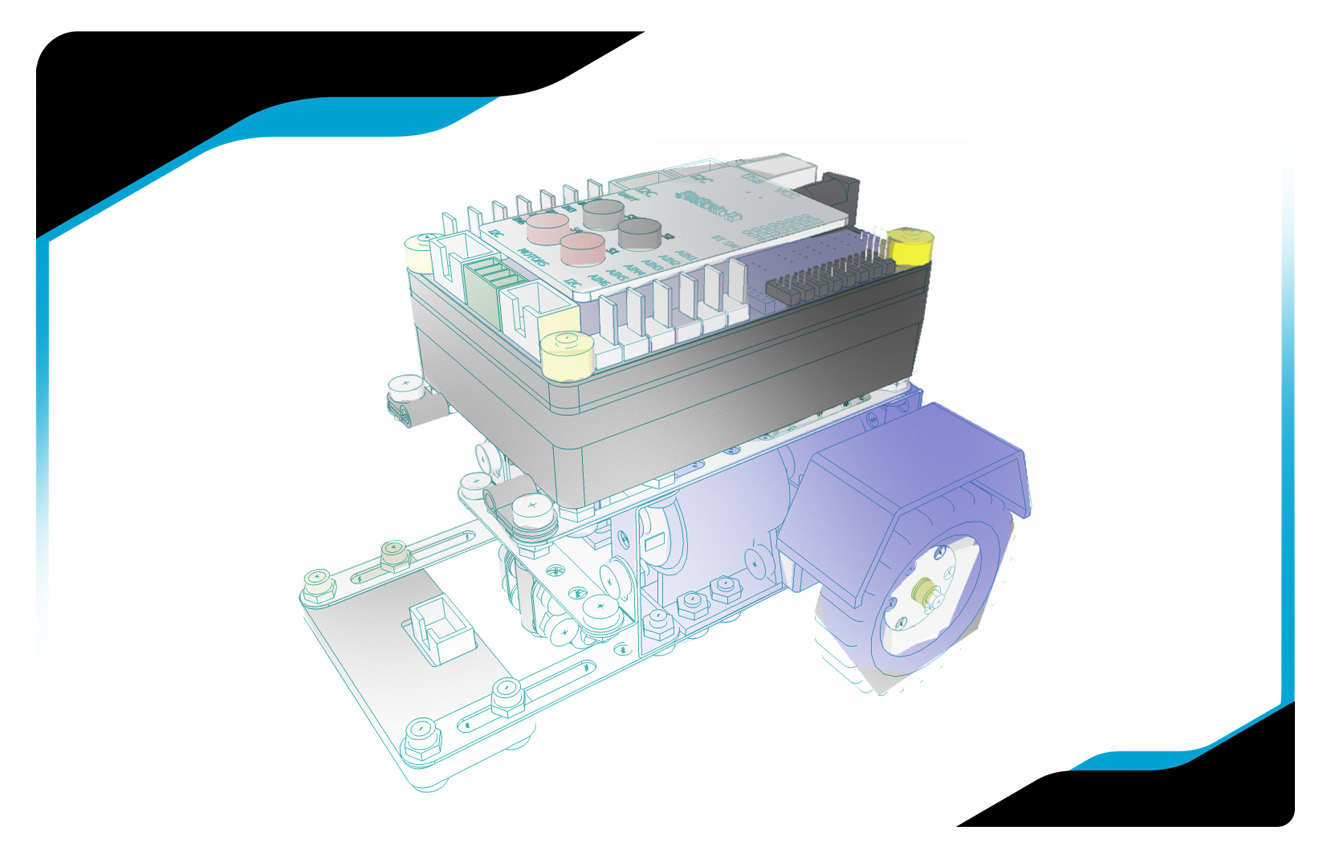
Plně funkční model kolového autonomního robota s diferenciálním systémem řízení podvozku. Základ robota tvoří dva DC motory, které skrze šnekovou převodovku pohání kolové nápravy. Senzorický subsystém tvoří čárový senzor. Podvozek robota doplňuje ostruhové kolečko.
Komponenty potřebné pro stavbu modelu
| Komponenta | Název | Množství | Vyobrazeni |
|---|---|---|---|
| 1002 | Pásek 3_0,8 | 4 |  |
| 1006 | Pásek 7_0,8 | 1 |  |
| 1008 | Pásek 11_0,8 | 4 |  |
| 1114 | Profil U1×3×3×1_0,8 | 4 |  |
| 1151 | Podložka d=10 | 12 |  |
| 1202 | Profil U1×3×1 | 2 |  |
| 1251 | Profil L1×1_0,8 | 2 |  |
| 1252 | Profil L1×1_0,8 | 4 |  |
| 1253 | Profil L1×2_0,8 | 2 |  |
| 1281 | Úhelník | 4 |  |
| 1303 | Ráfek kola D=34 plastový | 2 |  |
| 1352P | Osa profilová 4×65 | 2 |  |
| 1365 | Konzolová osa | 1 |  |
| 1400 | Elastický kroužek malý 6×3 | 7 |  |
| 1402 | Plastický staváček profilová osa | 5 |  |
| 1403 | Spojka os | 1 |  |
| 1422 | Pneumatika 57×30×6,5 | 2 |  |
| 1458 | Šnekový převod M1 | 2 |  |
| 1466 | Náboj kola kruhový profil | 3 |  |
| 1478 | Ozubené kolo 30Z se staváčkem | 2 |  |
| 1495 | Klec motoru | 2 |  |
| 1496 | Motor | 2 |  |
| 1511 | Matka M4_2,2 | 54 |  |
| 1514 | Šroub M4×6 | 36 |  |
| 1516 | Šroub M4×12 | 6 |  |
| 1562 | Plasový blatník | 2 |  |
| 1810 | Ložisko | 4 |  |
| 1830 | Redukce na osu motoru d=2mm | 2 |  |
| ME0030 | Šroub M4×40 | 4 |  |
| ME2207 | Držák kabelů | 2 |  |
| MEKB01 | Napájecí kabel 15 cm | 1 |  |
| MEKI02 | I2C kabel 25 cm | 1 |  |
| MEMO02 | Li-Ion baterka s nabíječkou | 1 |  |
| MESI05 | Senzor čáry | 1 |  |
Ke stažení
SKP Model:
- Pro psaní komentářů se přihlaste.